# 🥔 Potatis
 - `/mos6502` - Generic CPU emulator. Passes all tests, including illegal ops. (No BCD mode).
- `/nes` - A very incomplete NES emulator.
- `/nes-sdl` - Native target using SDL.
- `/nes-wasm` - Browser target using WASM.
- `/nes-cloud` - NES-as-a-service. Clientless cloud gaming with netcat and terminal rendering.
- `/nes-embedded` - Embedded target for RP-2040 (Raspberry Pi Pico).
- `/nes-android` - Android target using JNI.
## /mos6502
```rust
let load_base = 0x2000;
let mem = Memory::load(&program[..], load_base);
let cpu = Cpu::new(mem);
let mut machine = Mos6502::new(cpu);
loop {
machine.tick()
println!("{}", machine); // Prints nestest-like output
}
```
### Debugging
```rust
let mut debugger = machine.debugger();
debugger.verbose(true); // Trace, dumps disassembled instructions to stdout
debugger.add_breakpoint(Breakpoint::Address(0x0666));
debugger.add_breakpoint(Breakpoint::Opcode("RTI"));
debugger.watch_memory_range(0x6004..=0x6104, |mem| {
// Invoked when memory in range changes
});
```
## /nes
Supported mappers:
- NROM (mapper 0)
- MMC1 (mapper 1)
- UxROM (mapper 2)
- CNROM (mapper 3)
- MMC3 (mapper 4)
```rust
impl nes::HostPlatform for MyHost {
fn render(&mut self, frame: &RenderFrame) {
// frame.pixels() == 256 * 240 * 3 RGB array
}
fn poll_events(&mut self, joypad: &mut Joypad) {
// pump events and forward to joypad
}
}
let cart = Cartridge::blow_dust("path/to/rom.nes")?;
let mut nes = Nes::insert(cart, MyHost::new());
loop {
nes.tick();
println!("{:?}", nes); // Complete nestest formatted output
}
```
## /nes-sdl
`cargo run --release path/to/rom.nes`
`cargo run -- --help` for options
## /nes-wasm
1. `cd nes-wasm`
2. `wasm-pack build --release --target web`
3. `npm install`
4. `npm run dev`
Try it here: https://henrikpersson.github.io/nes/index.html
## /nes-cloud
Cloud gaming is the [next big thing](http://stadia.google.com). Obviously, Potatis needs to support it as well. No client needed,
only a terminal and netcat.
### Usage
```
stty -icanon && nc play-nes.org 4444
```
_`stty -icanon` disables input buffering for your terminal, sending input directly to netcat. You can also connect without it but then you'd have to press ENTER after each key press._
### Bring your own ROM
```
stty -icanon && cat zelda.nes - | nc play-nes.org 4444
```
### Rendering
- [Sixel](https://en.wikipedia.org/wiki/Sixel) (port 6666) is recommended if your terminal supports it. iTerm2 does.
- Unicode color (port 5555) works by using the unicode character ▀ "Upper half block", `U+2580` to draw the screen. Since the lower part of the character is transparent, [ANSI color codes](https://en.wikipedia.org/wiki/ANSI_escape_code#3-bit_and_4-bit) can be used to simultaneously draw two horizontal lines by setting the block's foreground and background color. Unfortunately the resulting frame is still too large to fit in a normal terminal window, so when using this mode **you have to decrease your terminal's font size a lot**.
- ASCII (port 7777). No color, no unicode, just ASCII by calculating luminance for each RGB pixel. Same here, **you have to decrease your terminal's font size a lot** to see the whole picture.
## /nes-embedded
It also runs on a RP-Pico with only 264kB available RAM! Without any optimizations it started out at ~0.5 FPS. But after some overclocking, and offloading the display rendering to the second CPU core, it now runs at a steady 5 FPS.
Total heap usage, single-core: 135kB
- `/mos6502` - Generic CPU emulator. Passes all tests, including illegal ops. (No BCD mode).
- `/nes` - A very incomplete NES emulator.
- `/nes-sdl` - Native target using SDL.
- `/nes-wasm` - Browser target using WASM.
- `/nes-cloud` - NES-as-a-service. Clientless cloud gaming with netcat and terminal rendering.
- `/nes-embedded` - Embedded target for RP-2040 (Raspberry Pi Pico).
- `/nes-android` - Android target using JNI.
## /mos6502
```rust
let load_base = 0x2000;
let mem = Memory::load(&program[..], load_base);
let cpu = Cpu::new(mem);
let mut machine = Mos6502::new(cpu);
loop {
machine.tick()
println!("{}", machine); // Prints nestest-like output
}
```
### Debugging
```rust
let mut debugger = machine.debugger();
debugger.verbose(true); // Trace, dumps disassembled instructions to stdout
debugger.add_breakpoint(Breakpoint::Address(0x0666));
debugger.add_breakpoint(Breakpoint::Opcode("RTI"));
debugger.watch_memory_range(0x6004..=0x6104, |mem| {
// Invoked when memory in range changes
});
```
## /nes
Supported mappers:
- NROM (mapper 0)
- MMC1 (mapper 1)
- UxROM (mapper 2)
- CNROM (mapper 3)
- MMC3 (mapper 4)
```rust
impl nes::HostPlatform for MyHost {
fn render(&mut self, frame: &RenderFrame) {
// frame.pixels() == 256 * 240 * 3 RGB array
}
fn poll_events(&mut self, joypad: &mut Joypad) {
// pump events and forward to joypad
}
}
let cart = Cartridge::blow_dust("path/to/rom.nes")?;
let mut nes = Nes::insert(cart, MyHost::new());
loop {
nes.tick();
println!("{:?}", nes); // Complete nestest formatted output
}
```
## /nes-sdl
`cargo run --release path/to/rom.nes`
`cargo run -- --help` for options
## /nes-wasm
1. `cd nes-wasm`
2. `wasm-pack build --release --target web`
3. `npm install`
4. `npm run dev`
Try it here: https://henrikpersson.github.io/nes/index.html
## /nes-cloud
Cloud gaming is the [next big thing](http://stadia.google.com). Obviously, Potatis needs to support it as well. No client needed,
only a terminal and netcat.
### Usage
```
stty -icanon && nc play-nes.org 4444
```
_`stty -icanon` disables input buffering for your terminal, sending input directly to netcat. You can also connect without it but then you'd have to press ENTER after each key press._
### Bring your own ROM
```
stty -icanon && cat zelda.nes - | nc play-nes.org 4444
```
### Rendering
- [Sixel](https://en.wikipedia.org/wiki/Sixel) (port 6666) is recommended if your terminal supports it. iTerm2 does.
- Unicode color (port 5555) works by using the unicode character ▀ "Upper half block", `U+2580` to draw the screen. Since the lower part of the character is transparent, [ANSI color codes](https://en.wikipedia.org/wiki/ANSI_escape_code#3-bit_and_4-bit) can be used to simultaneously draw two horizontal lines by setting the block's foreground and background color. Unfortunately the resulting frame is still too large to fit in a normal terminal window, so when using this mode **you have to decrease your terminal's font size a lot**.
- ASCII (port 7777). No color, no unicode, just ASCII by calculating luminance for each RGB pixel. Same here, **you have to decrease your terminal's font size a lot** to see the whole picture.
## /nes-embedded
It also runs on a RP-Pico with only 264kB available RAM! Without any optimizations it started out at ~0.5 FPS. But after some overclocking, and offloading the display rendering to the second CPU core, it now runs at a steady 5 FPS.
Total heap usage, single-core: 135kB
Total heap usage, multi-core: 243kB (2x frame buffers)
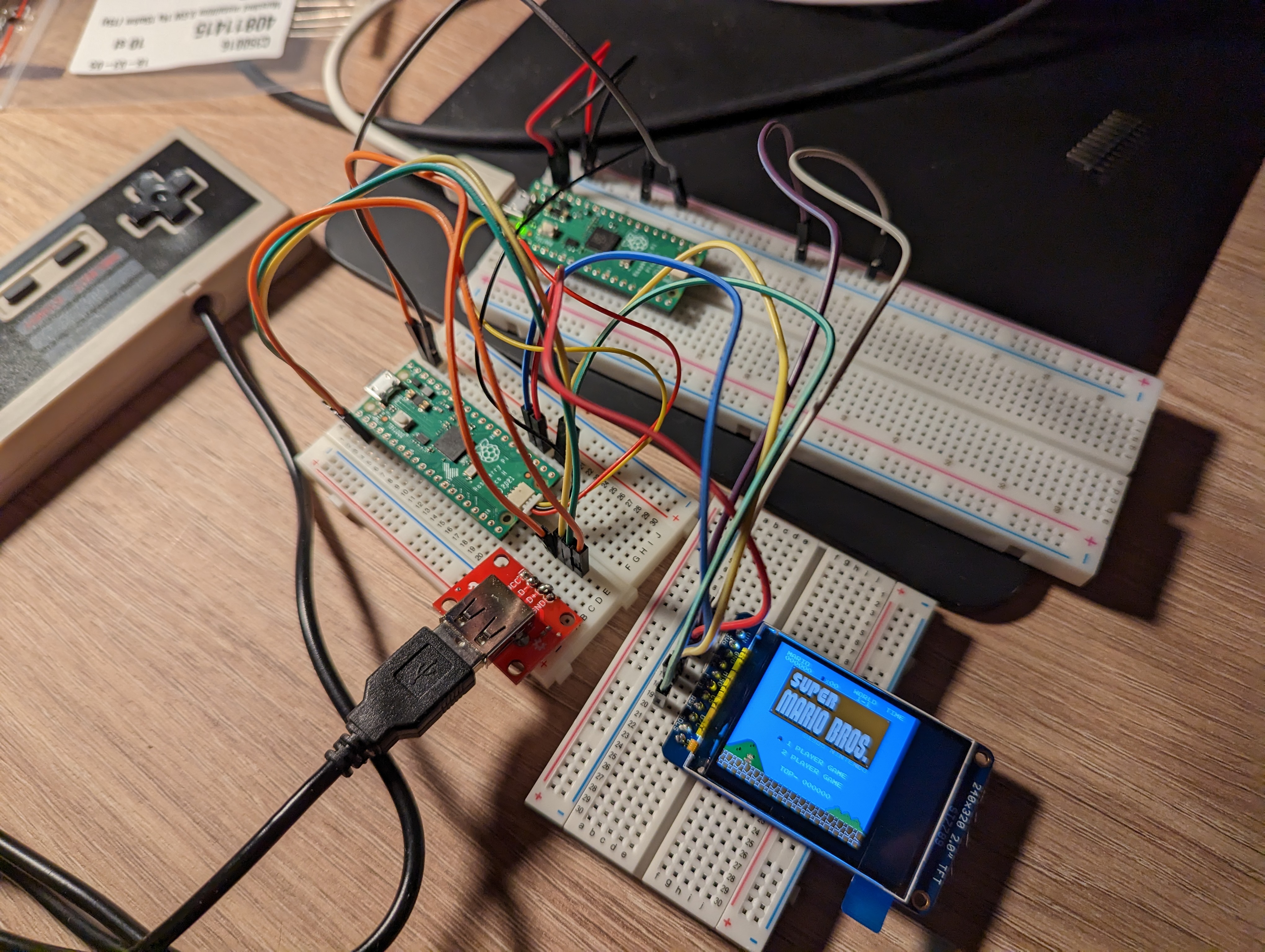 _The second Pico on the picture is wired up as a SWD debugger/flasher. The display is a [ST7789 by Adafruit](https://www.adafruit.com/product/4311)_.
_The second Pico on the picture is wired up as a SWD debugger/flasher. The display is a [ST7789 by Adafruit](https://www.adafruit.com/product/4311)_.
```
cd nes-embedded
ROM=/path/to/rom.nes cargo run --release
```
If you don't have a debug-probe setup, change the runner in `.cargo/config` to use a normal `elf2uf2`.
## /nes-android
1. Download Android NDK and `rustup target add [target]`
2. Configure your target(s) in `~/.cargo/config` with the linker(s) provided by the Android NDK
```
[target.aarch64-linux-android]
linker = "$NDK_PATH/toolchains/llvm/prebuilt/darwin-x86_64/bin/aarch64-linux-android33-clang"
[target.armv7-linux-androideabi]
linker = "$NDK_PATH/toolchains/llvm/prebuilt/darwin-x86_64/bin/armv7a-linux-androideabi30-clang"
[target.x86_64-linux-android]
linker = "$NDK_PATH/toolchains/llvm/prebuilt/darwin-x86_64/bin/x86_64-linux-android30-clang"
```
3. `cd nes-android && ./install.sh release`
_Note: install.sh only targets arm64-v8a (aarch64-linux-android)._
# Test
Run all unit and integration tests (for all crates):
`cargo test`
# TODO
- More mappers
- APU
# Key mappings
Up, left, down, right: WASD
B: K
A: L
Select: SPACE
Start: ENTER
Reset: R
# Thanks
- nesdev.org
- https://www.masswerk.at/6502/6502_instruction_set.html
- https://github.com/amb5l/6502_65C02_functional_tests
- http://www.baltissen.org/newhtm/ttl6502.htm (TTL6502.bin test)
- https://www.nesdev.com/neshdr20.txt
- https://github.com/christopherpow/nes-test-roms
- http://nesdev.org/loopyppu.zip
- https://www.youtube.com/watch?v=-THeUXqR3zY
- https://archive.nes.science/nesdev-forums/f2/t664.xhtml